
以前、透視投影変換について解説しました。

透視投影変換とは
3次元系の画像処理の勉強では、透視投影カメラモデルの理解は必須です。そんなわけで今回は透視投影カメラモデルについて解説してみたいと思います。(といっても、過去の記事でほぼ解説してしまった気がするので、この記事は簡単にまとめたものなります。)...
mem-archive.com
2018.12.02
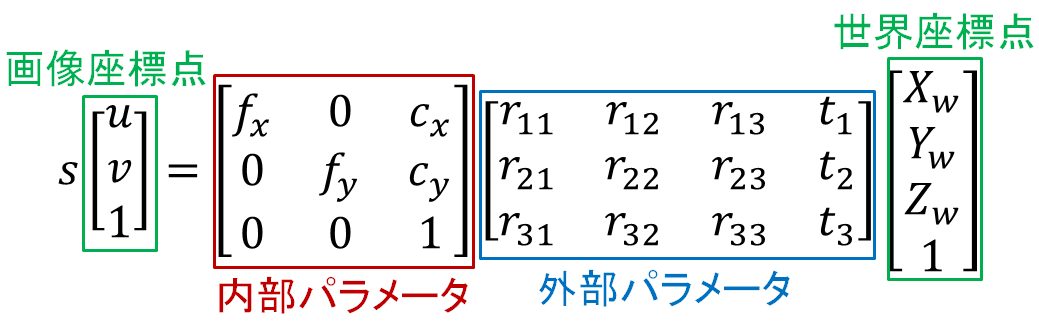
変換式はこんなのでしたよね。

で、この式の\(s\)って邪魔じゃないですか?
こいつがあるせいで、上の式の右辺を計算した後、最後に\(s\)で割るっていう、2段階手順が必要になっちゃうんですよね。
そこで、なんの役に立つかはわかりませんが、画像座標を一発で出す式を導出してみます。
まずは、世界座標点をカメラ座標点へ変換します。

次は画像座標に変換しましょう。

で、両辺を\(s\)(=\(Z_c\))で割ってやれば、一発で画像座標に変換できる式の完成です。

これを\([X_c,Y_c,Z_c]^t\)を使わずに表すと、こんな感じになります。

結構ごちゃごちゃした式になっちゃいましたねw
この式が何の役に立つかは正直思いつかないんですが、過去に何回か導出の必要に迫られたので、メモとして残しておきます。
なぜ導出の必要があったかは思い出せないw
コメント