
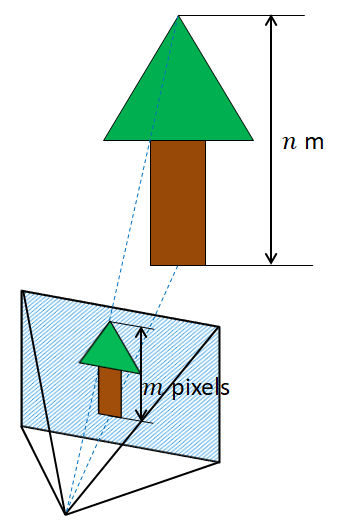
3次元系の画像処理の勉強では、透視投影カメラモデルの理解は必須です。
そんなわけで今回は透視投影カメラモデルについて解説してみたいと思います。
(といっても、過去の記事でほぼ解説してしまった気がするので、この記事は簡単にまとめたものなります。)
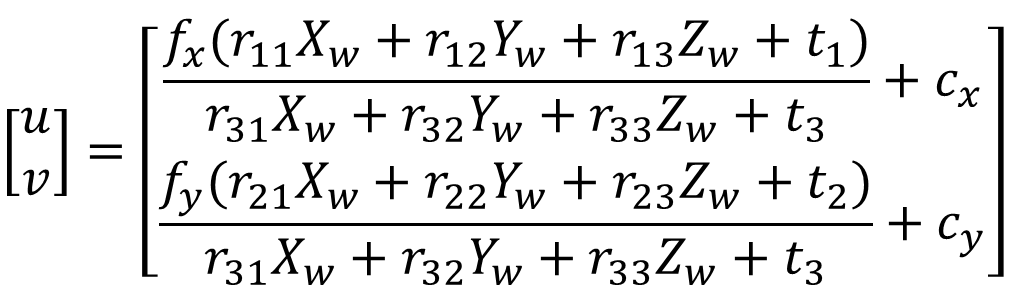
OpenCVでも紹介されている、言わずと知れた透視投影の式といえばこれですよね。

各行列を文字に置き換えるとこうなりますね。
$$s\boldsymbol{x}=\boldsymbol{A[R|t]X}_w$$
さて、そもそも内部パラメータと外部パラメータとはなんぞや?についてですが、
外部パラメータ:世界座標系からカメラ座標系への変換
内部パラメータ:カメラ座標系から画像座標系への変換
を表しています。
つまり透視投影変換は世界座標→カメラ座標→画像座標という変換を表していることになります。
それぞれ詳しく解説していきます。
外部パラメータ ~世界座標からカメラ座標への変換~
外部パラメータの持つ意味は、こちらの記事で解説しています。

カメラ外部パラメータとは
外部パラメータとはなんぞや?という話ですが、一言でいうと「世界座標をカメラ座標に変換する行列」のことです。式で表すとこうですね。待て待て、それだけ言われてもわからない。という人の為に、もう少し詳しく解説してみたいと思います。外部パラメータの...
mem-archive.com
2020.06.26
内部パラメータ ~カメラ座標から画像座標への変換~
内部パラメータの持つ意味は、こちらの記事で解説しています。

カメラ内部パラメータとは
前回は外部パラメータの意味を解説しました。なので今回は、外部パラメータと双璧をなす?内部パラメータの意味を解説してみたいと思います。内部パラメータとは内部パラメータとは、一言でいうと「カメラ座標を画像座標へ変換する行列」のことです。式で表す...
mem-archive.com
2020.06.26
ほぼ過去の記事を紹介するだけで終わってしまいましたw
ぶっちゃけ、式さえわかっていれば透視投影変換はできるんですけど、内部パラメータと外部パラメータの幾何学的な意味を理解しているのとしていないのは応用力が段違いなので、完璧に身につけましょう。
コメント
[…] NO MORE! 車輪の再発明透視投影変換とはhttps://mem-archive.com/2018/02/26/post-30/… Share. Twitter Facebook Google+ Pinterest LinkedIn Tumblr Email Previous […]